- 32 位 ARM Cortex-M0
- 128KB 閃存 / SRAM 48
- 硬件 TCP / IP COE(WIZnet 的 TCP / IP 引擎)
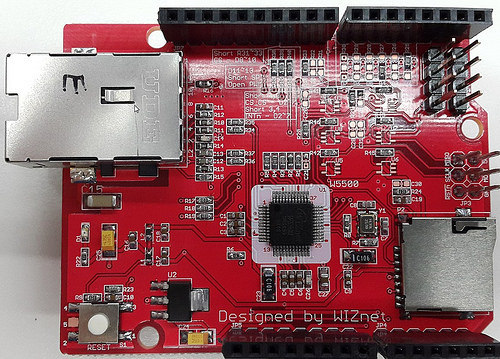
- 64TQFP(7×7毫米)
- CMSIS-DAP
- SWD Con.
- Arduino 引腳兼容
- ISP / SD插槽/ REG LED
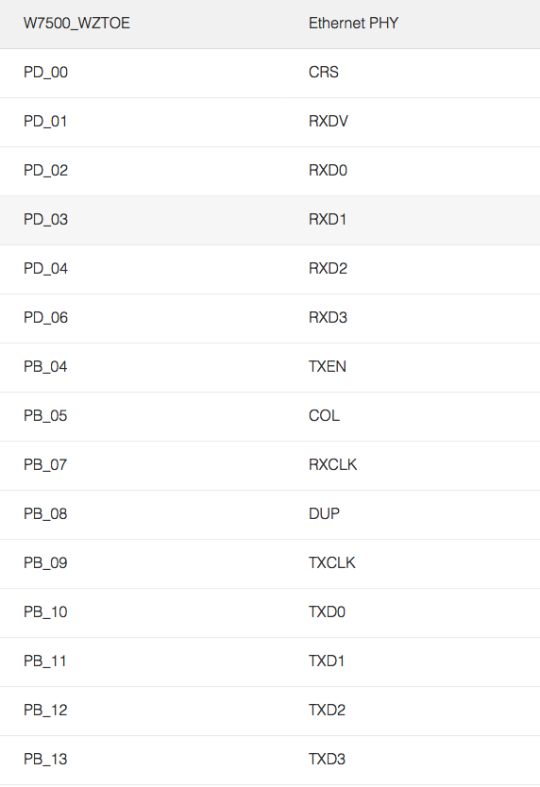
- 以太網 PHY
硬件:MII 接口
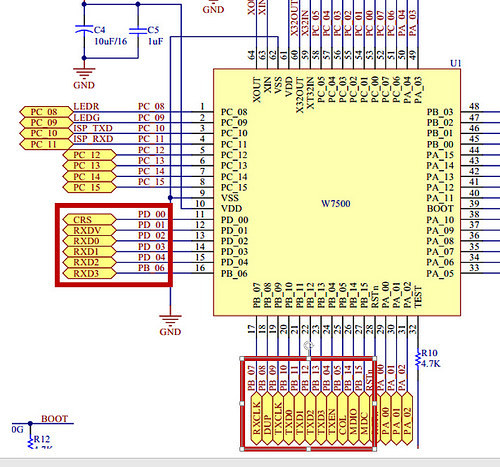
* WZTOE信號
- 通過GPIO MDIO
管理數據輸入/輸出(MDIO),也被稱為串行管理接口(SMI)或媒體獨立接口管理(MIIM),是用於以太網家族的IEEE 802.3標準的媒體獨立接口,或MII規定的串行總線。 信息產業部連接的媒體訪問控制(MAC)設備與以太網物理層(PHY)電路。
http://en.wikipedia.org/wiki/Management_Data_Input/Output
- PB_14 – MDIO(@ IC + 101)
- PB_15 – MDC(@ IC + 101
軟件:(將更新代碼的位置)
ioLibary :“互聯網卸載庫”WIZnet的芯片。 它包括驅動程序和應用協議。
$ W7500_FW 項目 Peripheral_Examples WZTOE ioLibrary
通過GPIO MDIO:它包括MDIO讀寫功能。
$ W7500_FW 項目 Peripheral_Examples WZTOE ioLibrary MDIO W7500x_miim.h
$ W7500_FW 項目 Peripheral_Examples WZTOE ioLibrary MDIO W7500x_miim.c
W7500 WZTOE(WIZnet的TCPIP引擎)驅動程序
$ W7500_FW 圖書館 W7500x_stdPeriph_Driver INC W7500x_WZTOE.h
$ W7500_FW 圖書館 W7500x_stdPeriph_Driver的 src W7500x_WZTOE.c
- 如何訪問WZTOE
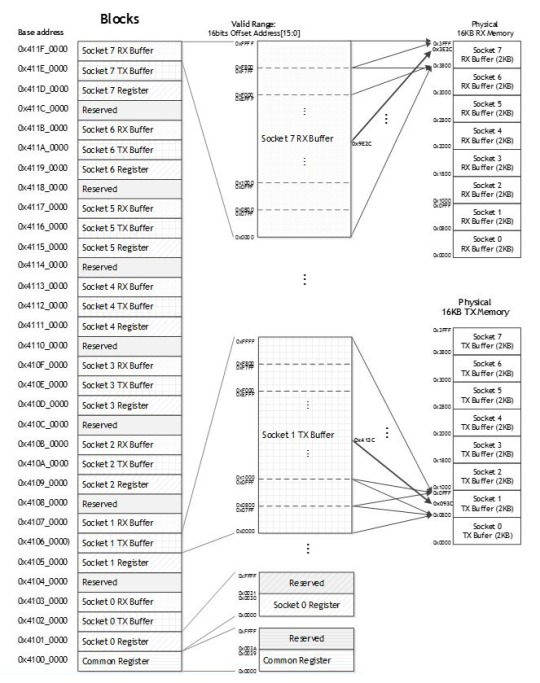
寄存器
#define WZTOE_COMMON_REGISTER_BASEADDR (0x4100_0000) #define WZTOE_SOCKET_REGISTER_BASEADDR(sock_num) (0x4101_0000 + (sock_num)<<18)) /* Write to wztoe common register with offset address of 3 */ offset_addr = 3; *(volatile uint32_t *)(WZTOE_COMMON_REGISTER_BASEADDR + offset_addr) = 0x12; /* Read to wztoe socket 3 register with offset address of 8 */ sock_num = 3; offset_addr = 8; val = *(volatile uint32_t *)(WZTOE_SOCKET_REGISTER_BASEADDR(sock_num) + offset_addr)
- TX/RX 緩衝區
Cortex-m0 能夠訪問由32位的地址. 然而,Sn_TX_WR(Socket n TX 寫指針寄存器) and Sn_RX_RD (Socket n RX 讀指針寄存器) 只是指針的低16位。因此,為了計算地址邊界,偏移地址應由 0xFFFF 掩蔽。
#define WZTOE_SOCKET_TXBUF_BASEADDR(sock_num) (0x4102_0000 + (sock_num)<<18)) #define WZTOE_SOCKET_RXBUF_BASEADDR(sock_num) (0x4103_0000 + (sock_num)<<18)) /* Write to wztoe TX buffer with offset address of 3 */ sock_num = 3; offset_addr = 0x0001_0000; *(volatile uint32_t *)(WZTOE_SOCKET_TXBUF_BASEADDR(sock_num) + (offset_addr&0xFFFF)) = 0x12; /* Read to wztoe RX buffer with offset address of 8 */ sock_num = 2; offset_addr = 8; val = *(volatile uint32_t *)(WZTOE_SOCKET_RXBUF_BASEADDR(sock_num) + (offset_addr&0xFFFF)
- TX/RX 緩衝區的 API
void WIZCHIP_READ_BUF (uint32_t BaseAddr, uint32_t ptr, uint8_t* pBuf, uint16_t len)
{
uint16_t i = 0;
WIZCHIP_CRITICAL_ENTER();
for(i = 0; i < len; i++)
pBuf[i] = *(volatile uint8_t *)(BaseAddr +((ptr+i)&0xFFFF));
WIZCHIP_CRITICAL_EXIT();
}
void WIZCHIP_WRITE_BUF(uint32_t BaseAddr, uint32_t ptr, uint8_t* pBuf, uint16_t len)
{
uint16_t i = 0;
WIZCHIP_CRITICAL_ENTER();
for( i=0; i<len; i++)
*(volatile uint8_t *)(BaseAddr + ((ptr+i)&0xFFFF)) = pBuf[i];
WIZCHIP_CRITICAL_EXIT();
}
void wiz_send_data(uint8_t sn, uint8_t *wizdata, uint16_t len)
{
uint32_t ptr = 0;
uint32_t sn_tx_base = 0;
if(len == 0) return;
ptr = getSn_TX_WR(sn);
sn_tx_base = (TXMEM_BASE) | ((sn&0x7)<<18);
WIZCHIP_WRITE_BUF(sn_tx_base, ptr, wizdata, len);
ptr += len;
setSn_TX_WR(sn,ptr);
}
void wiz_recv_data(uint8_t sn, uint8_t *wizdata, uint16_t len)
{
uint32_t ptr = 0;
uint32_t sn_rx_base = 0;
if(len == 0) return;
ptr = getSn_RX_RD(sn);
sn_rx_base = (RXMEM_BASE) | ((sn&0x7)<<18); WIZCHIP_READ_BUF(sn_rx_base, ptr, wizdata, len); ptr += len; setSn_RX_RD(sn,ptr); } ``` ### MDIO via GPIO * Port Init. ```cpp /* Set GPIOs for MDIO and MDC */ GPIO_InitTypeDef GPIO_InitDef; GPIO_InitDef.GPIO_Pin = GPIO_Pin_MDC | GPIO_Pin_MDIO; GPIO_InitDef.GPIO_Mode = GPIO_Mode_OUT; GPIO_Init(GPIOx, &GPIO_InitDef); PAD_AFConfig(PAD_PB, GPIO_Pin_MDIO, PAD_AF1); PAD_AFConfig(PAD_PB, GPIO_Pin_MDC, PAD_AF1); ``` * MDIO APIs ```cpp uint32_t link(void) { return ((mdio_read(GPIOB, PHYREG_STATUS)>>SVAL)&0x01);
}
void set_link(SetLink_Type mode)
{
uint32_t val=0;
assert_param(IS_SETLINK_TYPE(mode));
if( mode == CNTL_AUTONEGO)
{
val = CNTL_AUTONEGO;
}
else
{
val = (mode & (CNTL_SPEED|CNTL_DUPLEX));
}
mdio_write(GPIOB, PHYREG_CONTROL, val);
}
- MDIO 讀/寫功能
void output_MDIO(GPIO_TypeDef* GPIOx, uint32_t val, uint32_t n)
{
for(val <<= (32-n); n; val<<=1, n--)
{
if(val & 0x80000000)
GPIO_SetBits(GPIOx, MDIO);
else
GPIO_ResetBits(GPIOx, MDIO);
delay(1);
GPIO_SetBits(GPIOx, MDC);
delay(1);
GPIO_ResetBits(GPIOx, MDC);
}
}
uint32_t input_MDIO( GPIO_TypeDef* GPIOx )
{
uint32_t i, val=0;
for(i=0; i<16; i++)
{
val <<=1;
GPIO_SetBits(GPIOx, MDC);
delay(1);
GPIO_ResetBits(GPIOx, MDC);
delay(1);
val |= GPIO_ReadInputDataBit(GPIOx, MDIO);
}
return (val);
}